Как M2M-команды в Navixy IoT Logic обеспечивают координацию устройств в реальном времени

АвторSvyatoslav I., Product Manager, Navixy IoT Logic

Ваш видеорегистратор фиксирует, как водитель трет глаза. Ваш трекер регистрирует местоположение. Ваша платформа отображает предупреждение. И где-то между этими событиями и осмысленным откликом проходят минуты, пока оператор прокручивает очередь уведомлений на панели мониторинга.
Это и есть разрыв между обнаружением и реакцией, который определяет большинство телематических внедрений: устройства, которые видят все, но не предпринимают никаких действий без участия человека.
Теперь machine-to-machine команды доступны в IoT Logic, позволяя телематическим платформам моментально запускать автоматизированные реакции на устройствах в ту же секунду, когда фиксируются события. Ниже описано, как это работает и почему это важно.
Разрыв между обнаружением и реакцией в телематических системах
Современное коммерческое транспортное средство зачастую обладает большей вычислительной мощностью, чем диспетчерский центр, который его контролирует. GPS-трекеры передают координаты каждые несколько секунд. Видеорегистраторы (dashcams) анализируют поведение водителя с помощью компьютерного зрения. Датчики температуры отслеживают состояние груза. Датчики дверей фиксируют несанкционированное открытие. Каждое устройство генерирует телеметрию, и каждый поток телеметрии поступает в платформу, которая записывает, визуализирует и сигнализирует об этом.
Но регистрация и уведомление — это не то же самое, что действие.
Во многих случаях эти устройства выступают в роли независимых источников данных. Они находятся в одном транспортном средстве, но не "общаются" друг с другом. Когда камера фиксирует усталость или датчик обнаруживает скачок температуры, роль платформы сводится к уведомлению. Кто-то должен заметить это уведомление, оценить срочность, решить, что делать, и вручную инициировать действие.
Такая зависимость от человеческого внимания создает задержку, которая может длиться от нескольких секунд до нескольких часов, в зависимости от количества штата операторов, объема тревожных сообщений и уровня их подготовленности. Менеджеры по безопасности, изучающие события за ночь, часто начинают рабочий день с уже накопившихся предупреждений, сортируя второстепенные из них, прежде чем дойти до критических. Обнаружение происходило в реальном времени, а реакция — нет.
Как обычно реализуются межустройственные реакции сегодня
Организации, которые видят эту проблему, разработали обходные решения, у каждого из них есть нюансы:
- Ручное вмешательство по-прежнему остается основным вариантом. Оператор видит уведомление, оценивает ситуацию и отправляет команду или делает звонок. Это работает для рутинных ситуаций, но неэффективно при необходимости быстрой реакции или если оператора нет на месте.
- Внешние интеграции по API перенаправляют телеметрию во внешние системы, которые обрабатывают события и возвращают команды. Телематическая платформа становится узлом в более крупной архитектуре, передавая данные наружу и получая инструкции обратно. Каждый дополнительный шаг увеличивает задержку и требует обслуживания интеграции.
- Промежуточные платформы обеспечивают логику между источниками данных и системами, выполняющими действия, применяя бизнес-правила к входящим событиям. Эти решения могут быть мощными, но добавляют еще одного вендора, интерфейс и точку возможного сбоя в инфраструктуре.
- Собственная разработка предполагает создание специальных сервисов, которые подписываются на события телематики и генерируют соответствующие команды. Это обеспечивает максимальный контроль, но требует значительных ресурсов на разработку и поддержку.
Каждый из указанных подходов усложняет архитектуру. Данные передаются дальше, возрастает число систем, синхронизация усложняется. В итоге, чтобы команда дошла до устройства, которое могло бы среагировать сразу, приходится проходить весь этот путь.
А что, если реакция могла бы происходить непосредственно внутри самой телематической платформы?
Команды между устройствами и роль IoT Logic
IoT Logic — это визуальный конструктор логики внутри платформы Navixy, который позволяет организовывать автоматизацию на основе событий без внешних посредников или написания кода. Вместо того чтобы пересылать телеметрию наружу, IoT Logic обрабатывает поступающие данные непосредственно на платформе и при выполнении заданных условий инициирует действия.
Архитектура проста: данные поступают от устройства, проходят проверку в узлах, которые анализируют условия, и при совпадении условий Узел действия (Action Node) выполняет ответное действие. Это действие может включать в себя отправку команды другому устройству в рамках того же аккаунта.
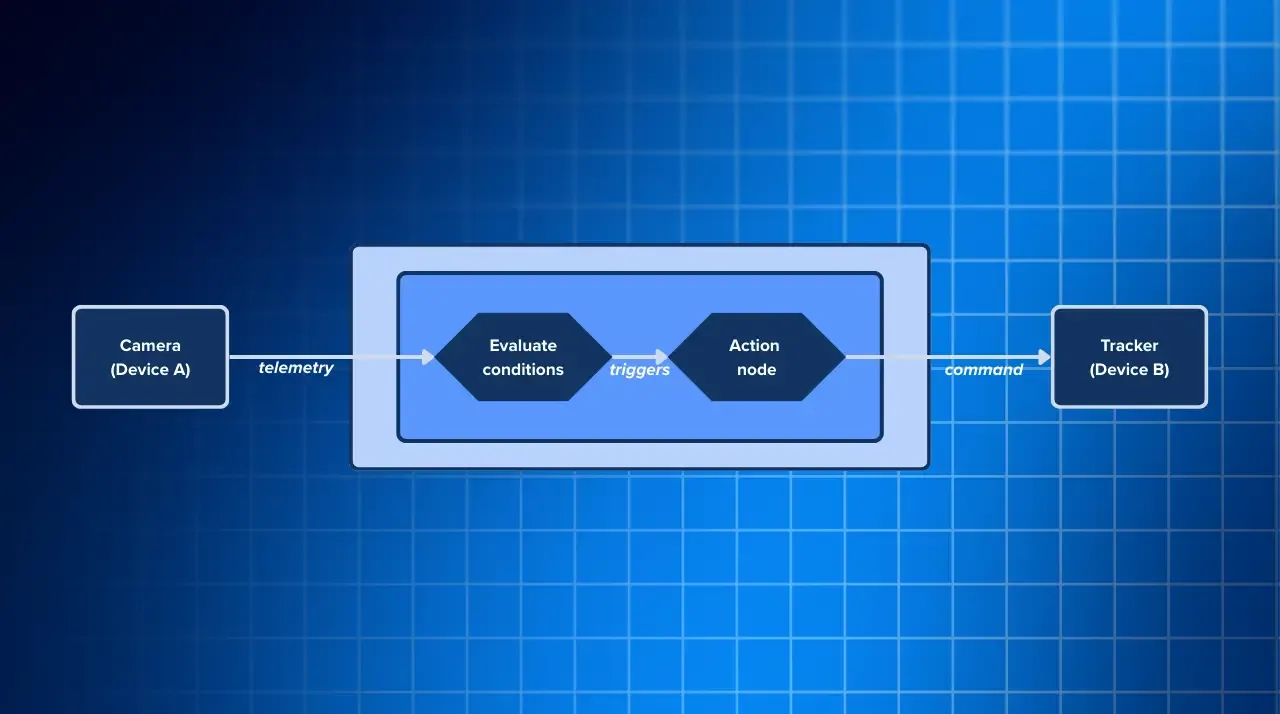
Так реализуется механизм machine-to-machine команд. Видеорегистратор фиксирует событие усталости. IoT Logic определяет код этого события. Если он совпадает с условием, то платформа отправляет команду трекеру в том же автомобиле, чтобы включить зуммер, подключенный к цифровому выходу. Весь процесс проходит внутри платформы, без вызовов внешнего API, без Middleware и без участия оператора.
Узел Actions поддерживает разные типы команд в зависимости от возможностей устройства. Можно включать цифровые выходы, менять конфигурацию, регулировать поведение трекера. Конкретные опции зависят от протокола, но суть остается одной: анализировать телеметрию, при совпадении условий отправлять соответствующие команды.
Для команд, уже знакомых с обработкой данных в IoT Logic, Узел действия расширяет те же самые визуальные сценарии, включая не только трансформацию данных, но и управление устройствами.
Архитектурные особенности важны не только для удобства
В типовых случаях телематическая платформа собирает данные и отображает их. Автоматизация требует внешних решений. События уходят во внешние системы через webhook или API, там обрабатываются, и затем команды возвращаются в платформу по отдельному каналу. Каждый переход от одной системы к другой добавляет задержку, обычно в несколько секунд, и требует аутентификации, обработки ошибок и мониторинга.
При событийной автоматизации, встроенной в платформу, цикл от обнаружения до действия замыкается внутри системы. Телеметрия поступает, логика обрабатывается, а команды отправляются в одном контуре, без сетевых запросов к сторонним сервисам и без сложной интеграции.
Это не значит, что полностью исчезает сложность. IoT Logic требует грамотной настройки. Нужно учесть правильные условия и знать возможности устройств. Но вся сложность сосредотачивается в процессе настройки, а не во внешних интеграциях. Когда все подготовлено, автоматизация работает стабильно и не зависит от доступности сторонних сервисов.
Результат — более быстрая реакция. На событие безопасности платформа отвечает за миллисекунды, а не ждет прохождения данных по цепочке интеграций.
Иллюстративный сценарий: обнаружение усталости водителя и автоматическое предупреждение
Представим автопарк, где камеры контроля водителя фиксируют признаки усталости: закрытие глаз, зевоту, "клевки" головой. В обычной схеме такие события отражаются в интерфейсе платформы. Менеджер службы безопасности, глядя на панель мониторинга, может заметить тревогу и связаться с водителем или диспетчером. Но если менеджер занят другими машинами, на совещании или просто не смотрит в экран в этот момент, водитель не получит мгновенной обратной связи.
При автоматизации на уровне устройств все выглядит иначе. Камера фиксирует усталость и передает телеметрию в платформу. IoT Logic узнает код события усталости. Не дожидаясь реакции человека, платформа отправляет команду GPS-трекеру в том же автомобиле. Трекер активирует цифровой выход, к которому подключен салонный зуммер. Водитель слышит предупреждающий сигнал через несколько секунд после обнаружения усталости.
Команда по безопасности по-прежнему может изучить этот инцидент. Предупреждение отображается в панели мониторинга. Но мгновенная реакция больше не зависит от того, заметит ее кто-то или нет.
Реальный пример: интеграция Howen MDVR и Teltonika FMB920
Этот сценарий не теоретический, а уже реализован в одном из автопарков.
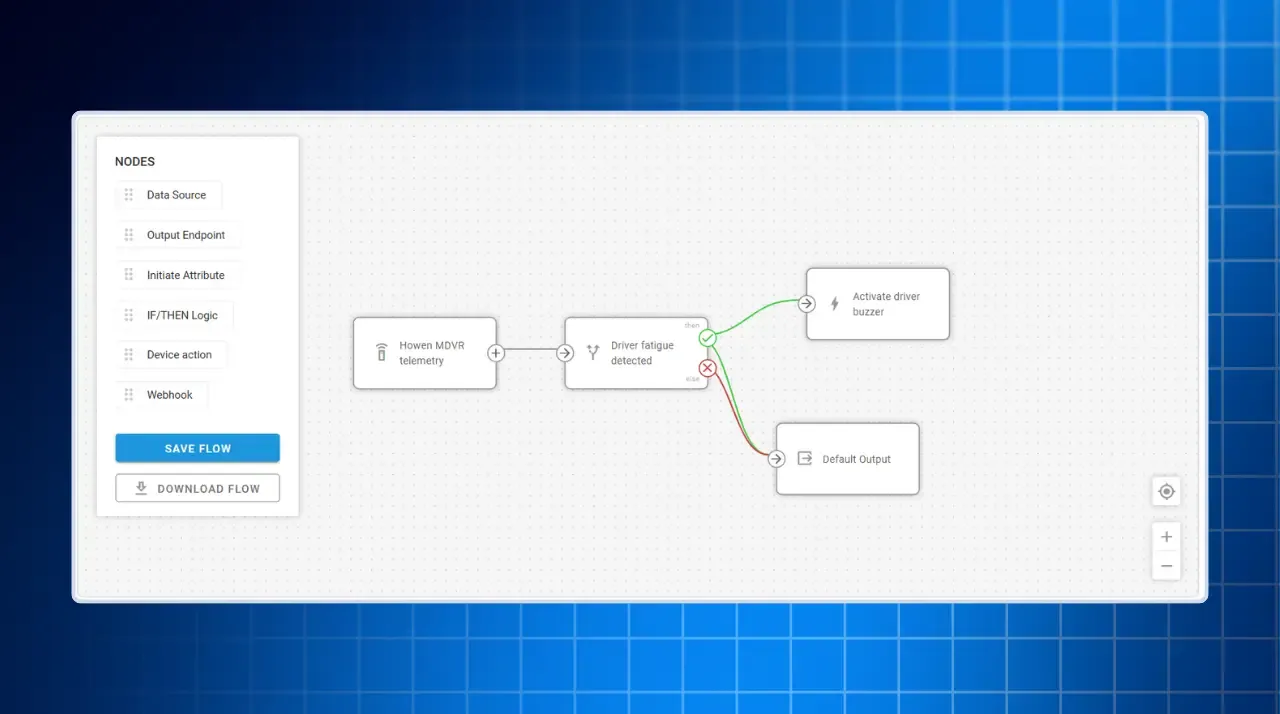
В решении используется система видеорегистраторов Howen MDVR и GPS-трекер Teltonika FMB920. Камера Howen осуществляет Driver Status Monitoring (DSM), определяя усталость, отвлеченность, разговоры по телефону и закрытые глаза. При обнаружении усталости камера отправляет телеметрию с определенным кодом события.
IoT Logic получает эти данные DSM и проверяет код усталости. При совпадении с настроенным правилом Узел действия автоматически отправляет команду включения цифрового выхода GPS-трекеру Teltonika FMB920, установленному в том же автомобиле.
В FMB920 есть цифровой выход, к которому подключено внешнее устройство — зуммер. Получив команду от IoT Logic, трекер включает выход, и водитель слышит звуковой сигнал.
Весь процесс — от обнаружения усталости до активации зуммера — проходит без участия диспетчера. Платформа управляет последовательностью событий, а оборудование обеспечивает физический отклик. И водитель тут же получает предупреждение, которое может предотвратить серьезное происшествие.
Более широкое применение в разных отраслях и ролях
Пример с предупреждением об усталости демонстрирует возможности для повышения безопасности, однако тот же механизм полезен и в других сферах:
- Команды безопасности автопарка могут настроить сценарии не только на усталость. При регистрации отвлечения камера может подать похожий сигнал. При резком торможении или агрессивном вождении трекер может включить сигнализацию на панели. Превышение скорости в выделенных зонах может вызывать немедленное звуковое оповещение, а не отчеты по факту.
- Логистические операторы, контролирующие состояние грузов, найдут схожие возможности. Датчик температуры, фиксирующий отклонения, может сразу отправлять команду на холодильную установку. Датчик двери, обнаруживший несанкционированное открытие, может активировать зуммер трекера или сделать фото.
- В цепочках холодовых перевозок, где сбои температуры могут испортить весь груз, важно реагировать за секунды, а не за минуты. В операциях мониторинга оборудования, когда механизм переходит в критическое состояние, нужна мгновенная реакция.
- Менеджеры полевых работ, контролирующие разрозненные объекты, могут настроить их автоматическую реакцию на пороговые значения датчиков, снижая нагрузку на операторов при сохранении контроля.
Общий смысл: автоматизацию ручной реакции можно заменить сконфигурированными сценариями. Логика заложена в платформе, а устройства выполняют команды. Оператор переключает внимание только на те ситуации, где требуется реальное человеческое вмешательство.
Заключение: практическая ценность автоматизации взаимодействия между устройствами
Телематические платформы традиционно хорошо собирают данные: регистрируют их из множества устройств, безопасно хранят, визуализируют. Переход к machine-to-machine командам означает, что платформа не только получает информацию, но и сама формирует действия, не передавая все процессы в сторонние системы и не дожидаясь реакции оператора.
Теперь такая возможность есть в IoT Logic. Настройка по-прежнему требует внимания, но результат дает то, что более сложные интеграции не могут дать: мгновенную реакцию, которая происходит внутри самой платформы.
Для провайдеров телематических услуг и владельцев автопарков это означает более простую архитектуру, более быстрые реакции и рабочие процессы, в которых приоритетные события обрабатываются в первую очередь — автоматически.
Если вы хотите использовать machine-to-machine команды в своей работе или узнать, как эта функция может применяться к вашим устройствам, запишитесь на демонстрацию, чтобы обсудить требования. Для технических подробностей по настройке IoT Logic и поддержке команд для устройств изучите документацию Navixy.