Comment créer plus rapidement des géozones basées sur des itinéraires à l’aide de fichiers KML

AuteurAdrian M., Technical Solution Engineer
Les équipes de flotte s’appuient sur des géozones basées sur les itinéraires pour contrôler les opérations, vérifier l’exécution des services et réagir en temps réel aux écarts. Comme les itinéraires changent fréquemment ou s’appliquent à de vastes flottes, la création manuelle des géozones devient rapidement un facteur limitant.
Ci-dessous, nous expliquons comment les fichiers KML et le géorepérage dans Navixy répondent à ce défi, en utilisant un exemple opérationnel concret pour montrer comment créer des géozones basées sur des itinéraires plus rapidement et avec moins d’efforts.
Points clés à retenir
- Les géozones construites autour d’itinéraires planifiés permettent aux flottes de contrôler directement le respect des trajets, la validation des services et la détection des écarts.
- Les fichiers KML permettent de réutiliser les itinéraires réels des véhicules, mais la création manuelle ne s’adapte pas bien à grande échelle.
- Navixy prend en charge les géozones basées sur des fichiers KML, permettant de réduire le temps de configuration de plusieurs heures à quelques minutes grâce à une méthode de traitement appropriée.
Géozones basées sur les itinéraires et contrôle opérationnel en gestion de flotte
Lorsque les flottes s’appuient uniquement sur des géozones statiques, elles peuvent déterminer où un véhicule s’est trouvé, mais pas comment il y est arrivé. Cet écart devient important lorsque les itinéraires font partie des opérations quotidiennes et non des exceptions. Si les conducteurs doivent suivre des trajectoires précises, les équipes doivent pouvoir surveiller ces trajets directement.
Les géozones basées sur des itinéraires résolvent ce problème. Plutôt que de se concentrer sur les entrées et sorties de zones fixes, les équipes peuvent savoir si les véhicules respectent les itinéraires approuvés, manquent des segments ou prennent des détours affectant les délais, la consommation ou la qualité de service. Dans les secteurs avec des exigences contractuelles ou réglementaires, cette visibilité soutient également la conformité sans nécessiter de contrôles manuels.
Il existe également un aspect pratique souvent négligé. Les géozones basées sur les itinéraires fournissent un historique fiable de ce qui s’est réellement passé sur la route. Cet historique est utile lorsque les clients questionnent l’exécution d’un service, lorsqu’un itinéraire est revu après un incident ou lorsque les équipes doivent trancher des désaccords à l’aide de données objectives.
Pour que cela fonctionne concrètement, les flottes ont besoin d’un moyen fiable pour capturer et réutiliser les itinéraires réels. Les fichiers KML offrent cette structure.
Vous pouvez également lire : Comment les petites flottes peuvent respecter leur planning sans répartiteur.
Qu’est-ce qu’un fichier KML et comment les flottes l’utilisent
En termes simples, un fichier KML est un format qui permet de stocker des informations géographiques telles que des itinéraires, points ou zones, de façon lisible par les outils cartographiques et les systèmes de flotte. Il ne définit pas comment une flotte doit fonctionner, mais ce qui s’est produit sur la carte.
Pour les équipes de flotte, la valeur des fichiers KML est pratique. Un itinéraire capturé à partir d’un vrai déplacement peut être sauvegardé comme un objet unique, visualisé, et réutilisé sans avoir à le redessiner manuellement. Les équipes d’exploitation peuvent évaluer sa pertinence, les équipes techniques valider sa géométrie, et le fichier peut être partagé entre outils sans perte de détails.
Les fichiers KML sont également largement compatibles, ce qui est essentiel dans des environnements réels où les données circulent entre systèmes. Les itinéraires exportés au format KML peuvent être ouverts dans des applications cartographiques courantes ou partagés avec des partenaires et clients lorsqu’il faut garantir la transparence des parcours. Ainsi, tout le monde travaille sur les mêmes données, et non sur une version simplifiée ou interprétée.
Lorsqu’ils sont utilisés pour créer des géozones basées sur des itinéraires, le processus est en principe simple :
- Le vrai itinéraire du véhicule est capturé depuis les données de suivi et sauvegardé au format KML.
- La géométrie de l’itinéraire est importée dans le système de flotte.
- Cette géométrie est traitée comme un couloir surveillé et non comme une simple ligne statique.
- Le système peut alors détecter quand un véhicule suit, quitte ou s’écarte de l’itinéraire.
C’est à ce stade qu’un itinéraire enregistré devient un outil de contrôle opérationnel.
Importation de géozones basées sur des itinéraires dans Navixy : un exemple concret
Pour les utilisateurs Navixy, les géozones sont un outil opérationnel essentiel. Elles permettent de définir des limites virtuelles sur la carte — circulaires, polygonales ou basées sur des itinéraires — et de surveiller automatiquement les interactions des véhicules avec ces zones. Les événements d’entrée, de sortie et de stationnement sont enregistrés sans supervision manuelle, soutenant les opérations quotidiennes dans les entrepôts, points de livraison ou zones restreintes.
En pratique, plusieurs partenaires Navixy ont exprimé un besoin précis : créer des géozones basées sur les itinéraires réels des véhicules. Cette fonctionnalité était cruciale dans des contextes où les trajets changeaient souvent ou reflétaient les conditions réelles de conduite, plutôt que des plans prédéfinis.
Navixy permet de créer manuellement des géozones basées sur les itinéraires. Toutefois, cette méthode devenait difficilement tenable pour les grandes flottes. Dans certains cas, la création à la main d’une géozone pour un itinéraire quotidien pouvait nécessiter jusqu’à huit heures de travail. Cela impactait directement la productivité, ralentissait le déploiement de nouveaux trajets, et menaçait même la rétention client, avec des pertes signalées allant jusqu’à 200 unités par mois à cause des retards de génération de trajets.
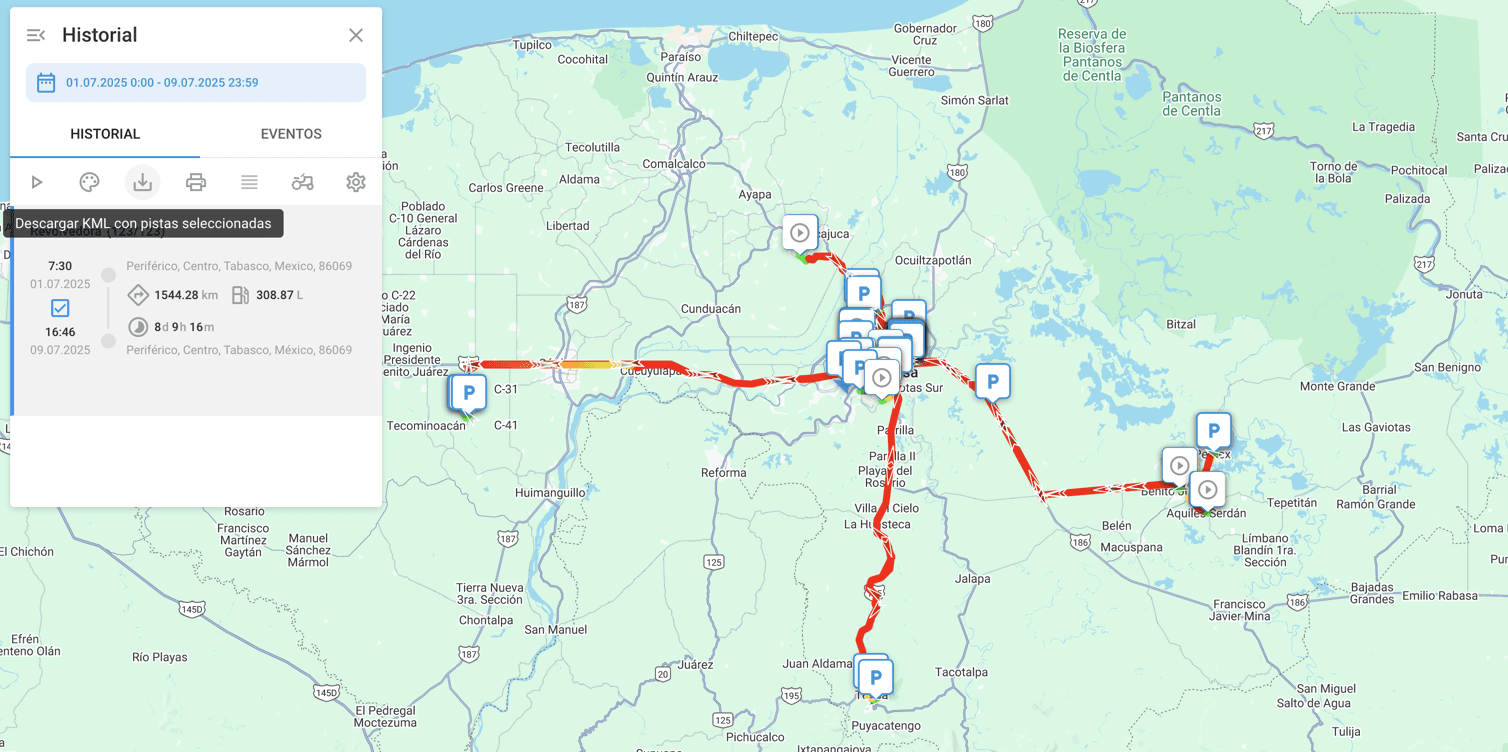
Lorsqu’un itinéraire est généré dans Navixy, il peut être téléchargé au format KML. Cela permet aux équipes de le consulter via des outils cartographiques externes ou de le réutiliser dans d’autres workflows nécessitant des données d’itinéraire.
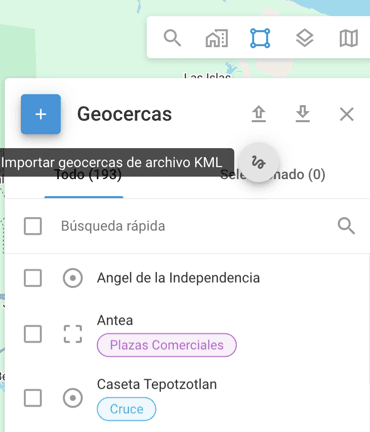
Navixy permet également d’importer des fichiers KML pour créer des géozones de type itinéraire, dites en « forme de saucisse ». Ces géozones suivent la vraie géométrie du trajet, offrant une solution pour surveiller les déplacements sur des trajets définis plutôt que de se baser uniquement sur des zones fixes.
Pourquoi une solution spécialisée est nécessaire alors que l’import/export KML existe déjà
Bien que Navixy propose l’import et l’export de trajets en KML, les données importées incluent souvent les points d’arrêt. Si le trajet d’un véhicule n’est pas continu, on obtient alors plusieurs géozones fragmentées, au lieu d’un seul itinéraire cohérent. Gérer ces fragments manuellement devient rapidement ingérable, surtout si chaque point doit être lié à des alertes.
L’exemple suivant montre un fichier KML importé sans traitement préalable.
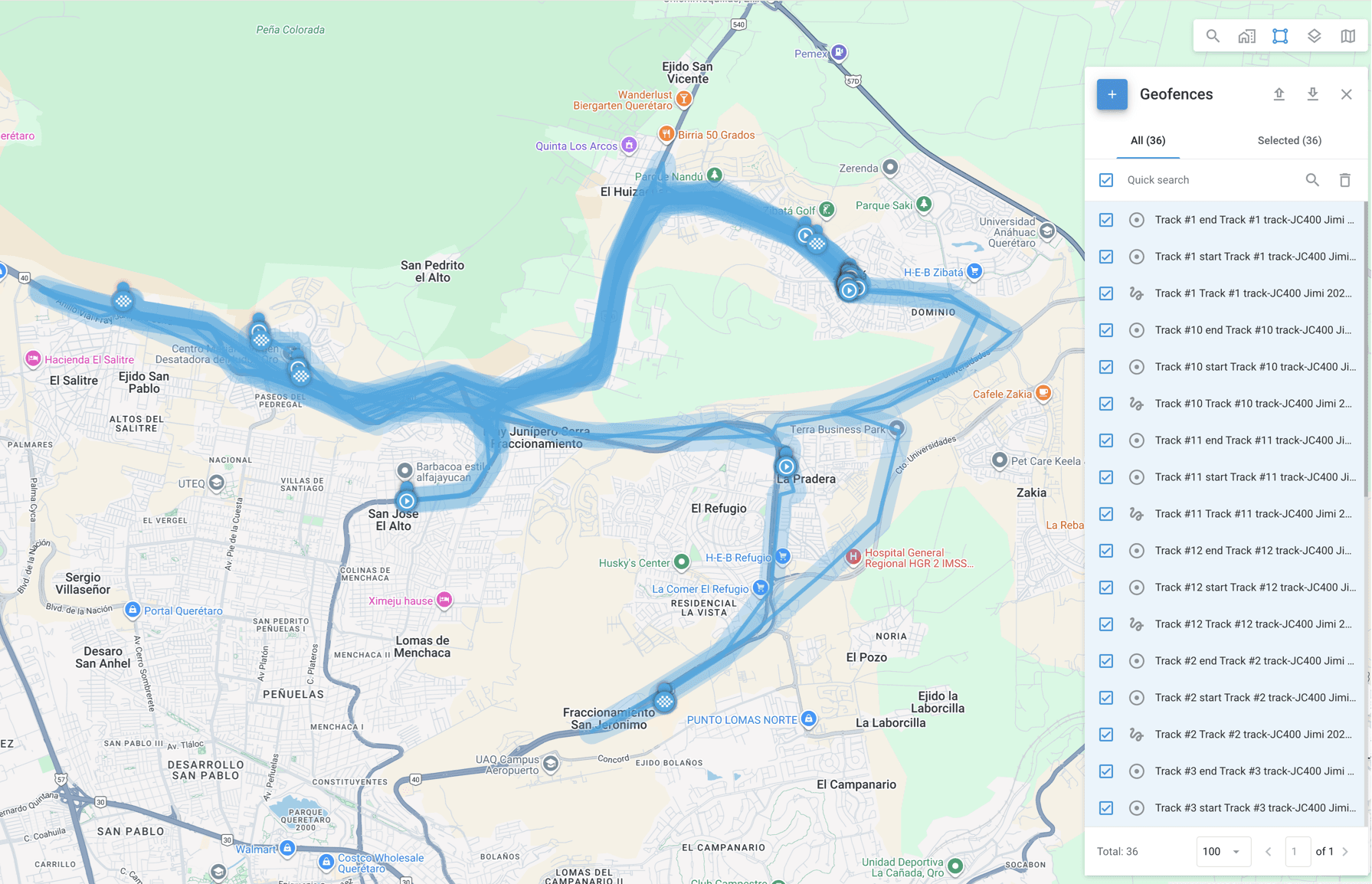
Comme on peut le voir, le système a généré 36 géozones distinctes : des points isolés (en cercles) et des segments de route découpés. Impossible alors de traiter l’ensemble comme un seul objet opérationnel.
Ceci a montré la nécessité d’unifier les segments et de supprimer les points d’arrêt avant d’importer le fichier comme géozone itinéraire. Le faire manuellement exige de comprendre la structure KML et d’avoir la compétence technique nécessaire pour fusionner correctement les données.
L’intelligence artificielle pour créer des géozones basées sur des itinéraires
Unifier manuellement les segments et supprimer les points des fichiers KML nécessite de comprendre la structure KML et de manipuler précisément la géométrie. Pour des itinéraires longs ou en constante évolution, ce travail devient rapidement impraticable.
Pour simplifier cette tâche, l’équipe a utilisé l’intelligence artificielle pour automatiser le nettoyage. L’objectif n’était pas de créer de nouveaux trajets, mais de transformer un fichier KML existant en une version épurée pouvant être importée comme géozone d’un seul tenant.
Pour ce faire de manière fiable, il faut avant tout comprendre la structure des fichiers KML exportés par Navixy. Un fichier typique comprend trois éléments clés :
- Placemark, qui contient les entités cartographiques (itinéraires, points)
- LineString, qui définit un itinéraire via une séquence de coordonnées
- Point, qui représente un endroit spécifique, comme un arrêt
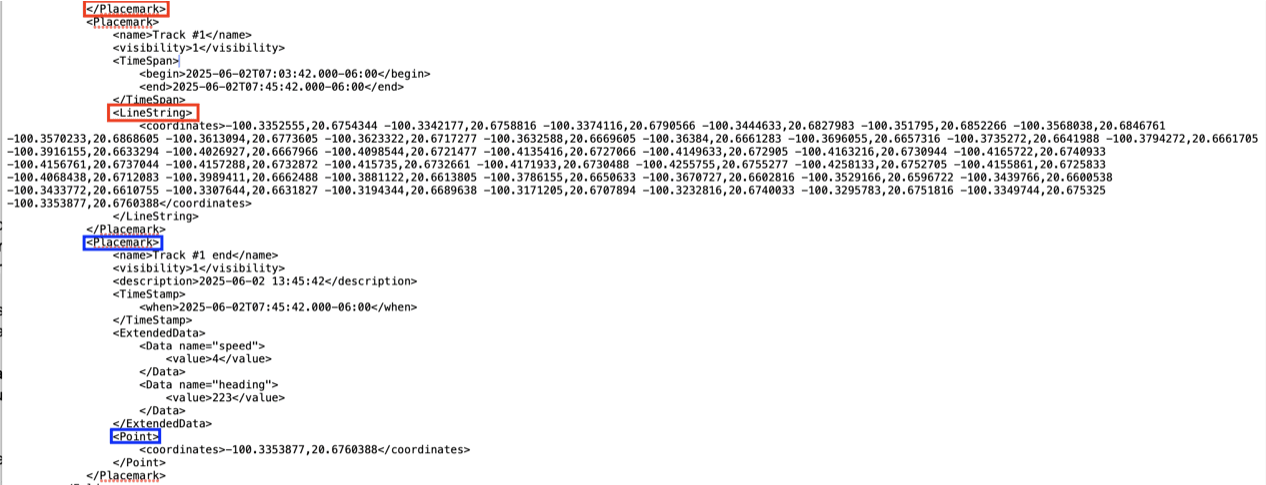
En comprenant cette structure et la façon dont les points sont représentés, on peut instruire l’IA pour générer un nouveau fichier KML sans les points mais avec des trajets unifiés. Cela consiste à extraire toutes les coordonnées des LineString, supprimer les Points, et fusionner les segments en une seule LineString dans un Placemark.
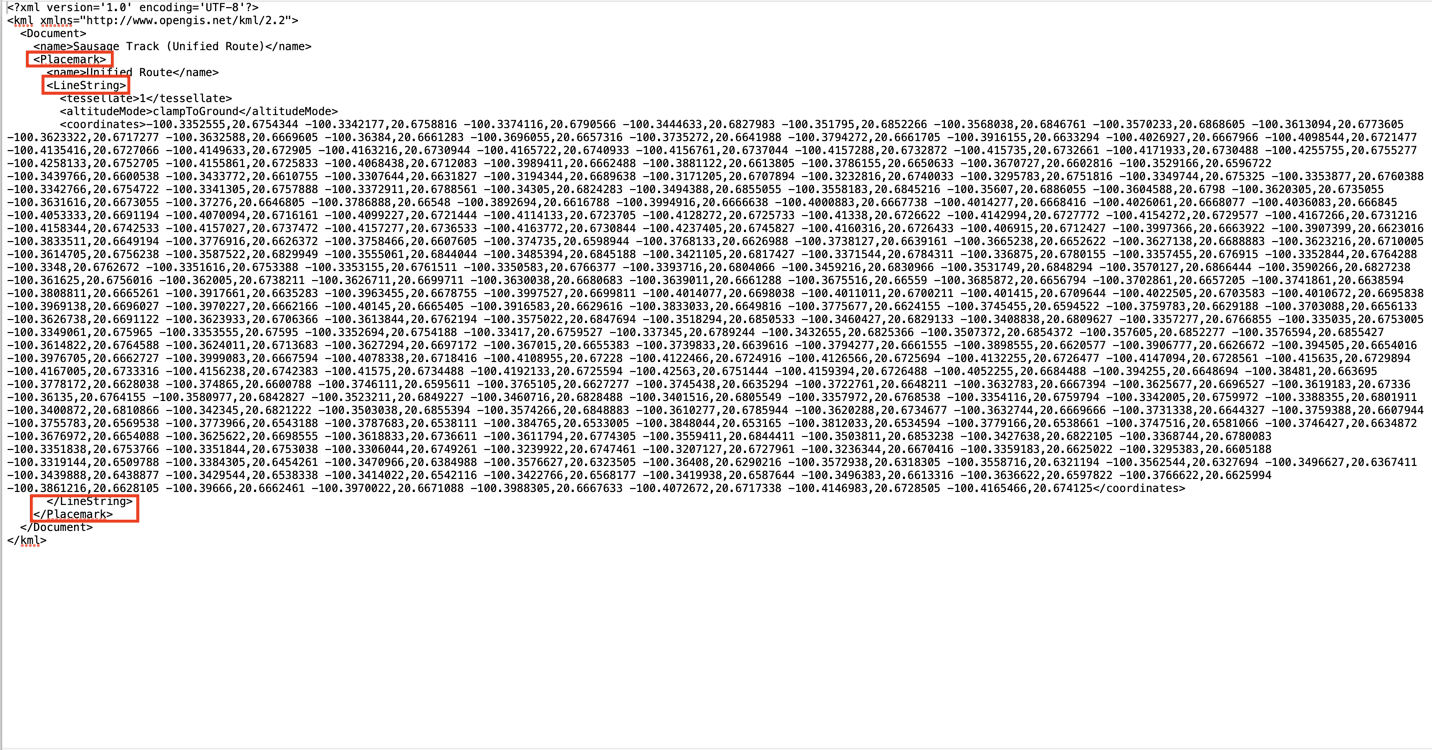
En pratique, l’IA est instruite pour :
- Extraire toutes les coordonnées des LineString présents dans les Placemarks, supprimer les Points
- Fusionner les coordonnées dans un seul élément LineString
- Retourner un fichier KML valide avec un seul Placemark contenant la route unifiée
Le fichier résultant contient ainsi un Placemark et une LineString avec toutes les coordonnées du trajet fusionnées.
Après avoir réimporté ce fichier dans Navixy, le système affiche un itinéraire unique englobant tous les segments dissociés au départ.
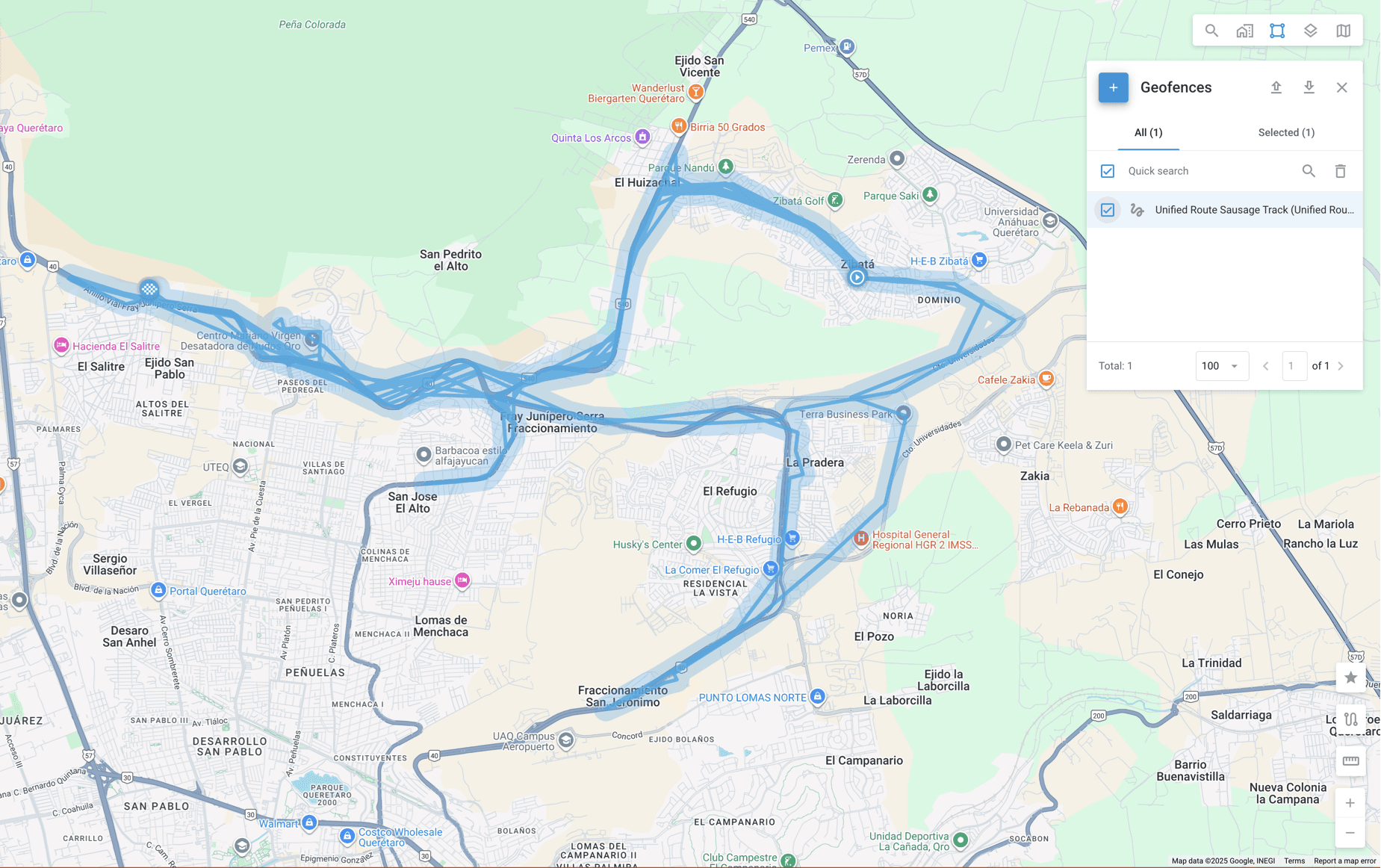
Comme indiqué, l’itinéraire est désormais unifié en tant que géozone sélectionnable capable de déclencher des alertes d’entrée et de sortie sur toute sa longueur.
Limites de l’approche de traitement des fichiers KML assistée par IA
Bien que cette méthode réduise fortement le travail manuel, elle comporte certaines limitations observées lors des tests.
Durée de l’itinéraire
Les itinéraires d’une seule journée se traitent sans problème. Lors des tests, l’approche a été étendue à deux jours (avec un appareil transmettant toutes les trois minutes). Pour des trajets de trois jours, l’IA n’assurait plus un traitement cohérent, générant des résultats incorrects.
Nombre de points
Les géozones en forme de trajet sont limitées à 1 024 points. Les longs trajets avec une densité élevée de données peuvent dépasser cette limite et demander un fractionnement en segments.
Contraintes des comptes IA
Le traitement présenté ici a été réalisé via des comptes premium de fournisseurs d’IA. Les comptes standards imposent souvent des restrictions plus strictes (taille de fichier, temps de traitement, complexité des requêtes), lesquelles influencent le résultat final.
Ce que l’approche KML change pour le géorepérage des itinéraires
Ce cas montre comment les géozones basées sur les itinéraires peuvent passer d’un processus manuel chronophage à une opération répétable. En utilisant les fichiers KML comme format commun pour capturer et réutiliser les trajets réels, les flottes accèdent à un moyen pratique de transformer les données de suivi en contrôles concrets, sans redessiner constamment les trajets.
Dans l’exemple Navixy, cette méthode a réduit le temps de configuration des géozones itinéraires de plusieurs heures à quelques minutes. Ce seul changement influence la rapidité de déploiement des trajets, la réactivité opérationnelle et la capacité à vérifier la conformité sur demande.
En même temps, l’exemple montre que cette solution ne s’applique pas à toutes les situations. La longueur du trajet, la densité de données, et les limites de traitement sont des facteurs à prendre en compte avant un déploiement à grande échelle. Utilisée dans ces limites, cette approche offre un moyen fiable de simplifier la gestion des trajets tout en conservant une visibilité complète sur ce qui se passe sur la route.
En résumé, les fichiers KML, les géozones basées sur les itinéraires et l’automatisation ciblée constituent une boîte à outils efficace pour les flottes qui souhaitent mieux contrôler l’exécution des trajets, et pas seulement la position des véhicules.
Vous souhaitez découvrir le fonctionnement des géozones itinéraires basées sur les fichiers KML ? Demandez une démo pour voir comment Navixy aide les flottes à convertir les trajets réels en géozones exploitables, réduire la configuration manuelle et garder un contrôle opérationnel à grande échelle.
Sur cette page
- Points clés à retenir
- Géozones basées sur les itinéraires et contrôle opérationnel en gestion de flotte
- Qu’est-ce qu’un fichier KML et comment les flottes l’utilisent
- Importation de géozones basées sur des itinéraires dans Navixy : un exemple concret
- Ce que l’approche KML change pour le géorepérage des itinéraires