Comment les commandes M2M dans Navixy IoT Logic permettent la coordination en temps réel des appareils

AuteurSvyatoslav I., Product Manager, Navixy IoT Logic

Votre caméra embarquée enregistre un conducteur se frottant les yeux. Votre traqueur consigne l’emplacement. Votre plateforme affiche une alerte. Et quelque part entre ces événements et une réponse concrète, il s’écoule des minutes pendant qu’un opérateur parcourt un arriéré de tableaux de bord.
C’est l’écart entre la détection et la réaction qui définit la plupart des déploiements télématiques : des dispositifs qui observent tout mais n’agissent sur rien sans intervention humaine.
Les commandes machine-à-machine sont désormais disponibles dans IoT Logic, permettant aux plateformes télématiques de déclencher des réponses automatisées entre les appareils dès qu’un événement se produit. Voici comment cela fonctionne et pourquoi c’est important.
L’écart entre la détection et la réaction dans les systèmes télématiques
Un véhicule commercial aujourd’hui embarque souvent plus de puissance de calcul que le centre de répartition qui le surveille. Les traceurs GPS transmettent la position toutes les quelques secondes. Les caméras embarquées analysent le comportement du conducteur grâce à la vision par ordinateur. Les capteurs de température surveillent l’état de la cargaison. Les capteurs de porte détectent tout accès non autorisé. Chaque dispositif génère des données de télémétrie, et chaque flux alimente une plateforme qui enregistre, visualise et déclenche des alertes.
Mais enregistrer et alerter ne sont pas la même chose qu’agir.
Dans la plupart des déploiements, ces dispositifs fonctionnent comme des sources de données indépendantes. Ils partagent un véhicule mais pas une conversation. Lorsqu’une caméra détecte de la fatigue ou qu’un capteur signale une hausse de température, le rôle de la plateforme s’arrête à la notification. Quelqu’un doit remarquer l’alerte, évaluer son urgence, décider d’une réponse et déclencher manuellement une action.
Cette dépendance vis-à-vis de l’attention humaine crée une latence qui varie de quelques secondes à plusieurs heures selon le personnel, le volume d’alertes et la connaissance qu’a l’opérateur de la situation. Les gestionnaires de sécurité qui examinent les alertes nocturnes commencent souvent leur journée en retard, en triant d’abord les notifications à faible priorité avant d’atteindre les plus critiques. La détection s’est produite en temps réel. La réaction, elle, ne l’a pas été.
Comment les réactions inter-appareils se produisent généralement aujourd’hui
Les organisations conscientes de cet écart ont développé des solutions de contournement, chacune avec ses compromis.
- Intervention manuelle : la réponse par défaut. Un opérateur voit une alerte, évalue la situation et envoie une commande ou contacte la personne concernée. Cela fonctionne pour les événements de routine, mais échoue quand le temps de réaction est crucial ou quand l’opérateur est indisponible.
- Intégrations API externes : elles transmettent la télémétrie vers des systèmes tiers qui traitent les événements et renvoient des commandes. La plateforme télématique devient un nœud au sein d’une architecture plus vaste, transmettant les données sortantes et recevant des instructions entrantes. Chaque étape ajoute de la latence et chaque intégration exige une maintenance.
- Plates-formes middleware : elles se trouvent entre les sources de données et les systèmes d’action, appliquant une logique métier aux événements entrants. Ces plateformes peuvent être puissantes, mais introduisent un fournisseur supplémentaire, une autre interface et un nouveau point de défaillance dans l’infrastructure.
- Développement personnalisé : il s’agit de développer des services spécifiques qui s’abonnent aux événements télématiques et déclenchent des réponses. Cela offre un contrôle maximal au prix de ressources de développement et d’une maintenance continue.
Chaque approche ajoute de la complexité architecturale. Les données doivent voyager davantage. Davantage de systèmes doivent être synchronisés. Davantage d’identifiants doivent être gérés. Et au bout de cette chaîne, une commande parvient enfin à l’appareil qui aurait pu réagir immédiatement si seulement on l’avait informé.
Que se passerait-il si la réaction pouvait se produire directement à l’intérieur de la plateforme télématique ?
Commandes d’appareil à appareil et rôle de IoT Logic
IoT Logic est un concepteur de logique visuelle au sein de la plateforme Navixy, qui permet une automatisation pilotée par événement sans middleware externe ni code personnalisé. Au lieu d’envoyer la télémétrie ailleurs pour traitement, IoT Logic évalue directement les données entrantes et déclenche des actions basées sur des conditions configurables.
L’architecture suit un schéma simple : les données arrivent d’un appareil, passent par des nœuds d’évaluation qui testent les conditions et, lorsque ces conditions correspondent, un nœud Action exécute une réponse. Cette réponse peut inclure l’envoi d’une commande à un autre appareil sur le même compte.
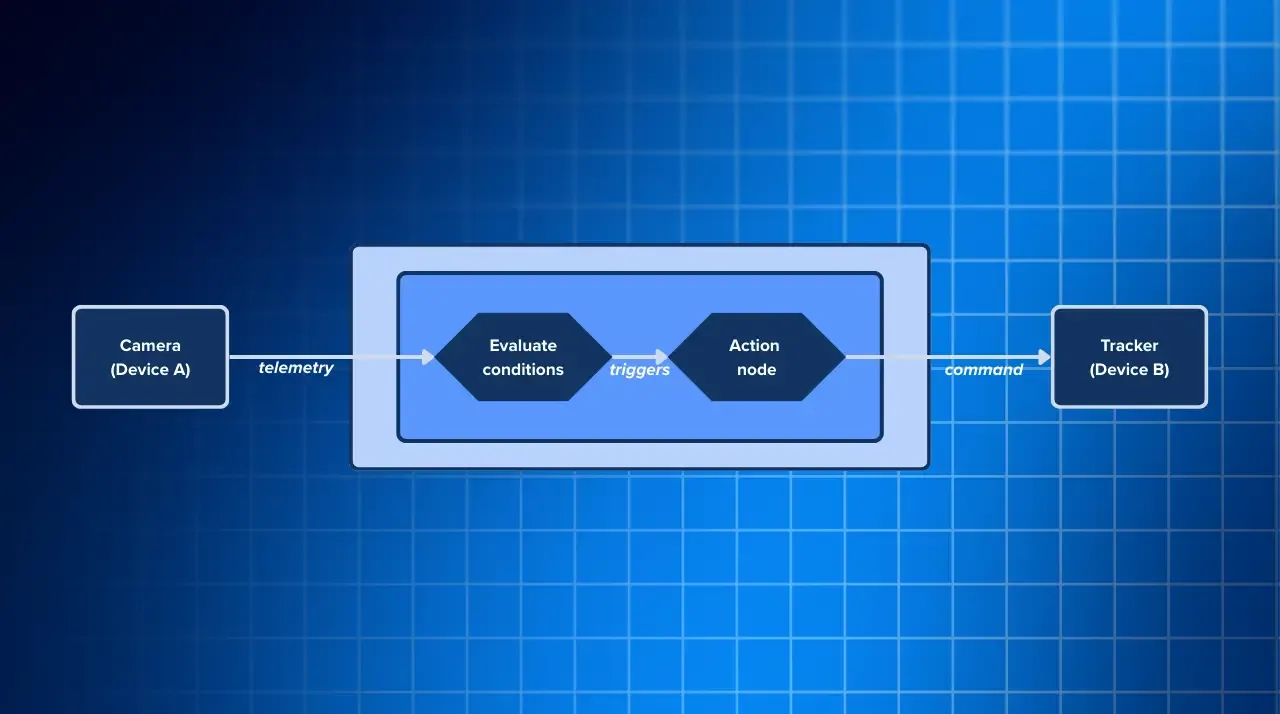
C’est le mécanisme qui sous-tend les commandes machine-à-machine. Une caméra génère un événement de fatigue. IoT Logic évalue le code d’événement. Si le code correspond à la condition configurée, la plateforme envoie une commande à un traqueur dans le même véhicule pour activer un buzzer connecté à sa sortie numérique. Toute la séquence se déroule au sein de la plateforme, sans appels d’API externes, sans traitement par un middleware et sans intervention d’un opérateur.
Le nœud Action prend en charge divers types de commandes selon les capacités de l’appareil cible. Les sorties numériques peuvent activer des accessoires externes. Les commandes de configuration peuvent ajuster le comportement d’un appareil. Les options spécifiques dépendent de ce que le protocole de l’appareil supporte, mais le principe reste le même : évaluer la télémétrie, comparer aux conditions et déclencher les commandes.
Pour les équipes déjà familières avec le traitement des données avec IoT Logic, le nœud Action prolonge le même flux de travail visuel pour inclure le contrôle des appareils, et pas seulement la transformation des données.
L’importance de la distinction architecturale au-delà de la commodité
Dans un déploiement typique, une plateforme télématique collecte et présente les données. L’automatisation nécessite des systèmes externes. Les événements sont transmis via des webhooks ou des API, le traitement se fait ailleurs, et les commandes reviennent via des intégrations distinctes. Chaque passage de frontière ajoute de la latence, généralement de l’ordre de quelques secondes au mieux, et chaque point d’intégration suppose une authentification, une gestion des erreurs et une surveillance.
Grâce à l’automatisation pilotée par événement intégrée à la plateforme, la boucle allant de la détection à l’action reste interne. La télémétrie arrive, l’évaluation se produit et les commandes sont envoyées dans le même contexte de traitement. Aucune transition réseau vers des services externes, pas d’échange d’identifiants, pas de dépendance à la disponibilité d’un middleware.
Cela n’élimine pas toute complexité. IoT Logic demande une configuration. Les conditions doivent être définies correctement. Les capacités des appareils doivent être comprises. Mais la complexité se concentre au niveau de la configuration plutôt qu’à l’exécution. Une fois paramétrée, l’automatisation s’exécute de manière fiable parce qu’elle ne dépend que de la plateforme et des appareils, et non de la disponibilité de services externes.
Le résultat pratique, c’est une réaction plus rapide. Lorsqu’un événement de sécurité survient, la réponse commence en millisecondes au lieu d’attendre que les données traversent une chaîne d’intégration.
Scénario illustratif : détection de fatigue et avertissement automatique
Considérons une flotte où les caméras de surveillance du conducteur détectent les comportements liés à la fatigue : yeux clos, bâillements, tête qui penche. Dans une configuration classique, ces détections génèrent des événements qui apparaissent dans l’interface de la plateforme. Un responsable de la sécurité, surveillant le tableau de bord, peut remarquer l’alerte et contacter le conducteur ou le répartiteur. Mais si ce responsable est occupé avec d’autres véhicules, en réunion ou simplement inattentif à cet instant, le conducteur ne reçoit aucun retour immédiat.
Avec l’automatisation d’appareil à appareil, la séquence change. La caméra détecte la fatigue et envoie sa télémétrie à la plateforme. IoT Logic évalue les données entrantes et reconnaît le code d’événement de fatigue. Sans attendre de validation humaine, la plateforme envoie une commande au traceur GPS du véhicule. Ce traceur active sa sortie numérique, à laquelle est relié un buzzer dans l’habitacle. Le conducteur entend l’avertissement quelques secondes après la détection.
L’équipe de sécurité peut toujours examiner l’événement. L’alerte s’affiche toujours dans le tableau de bord. Mais la réaction immédiate ne dépend plus du fait que quelqu’un la remarque au préalable.
Mise en œuvre concrète : intégration Howen MDVR et Teltonika FMB920
Ce scénario n’a rien d’hypothétique. Une flotte utilise exactement cette configuration pour générer des avertissements automatiques en cas de fatigue.
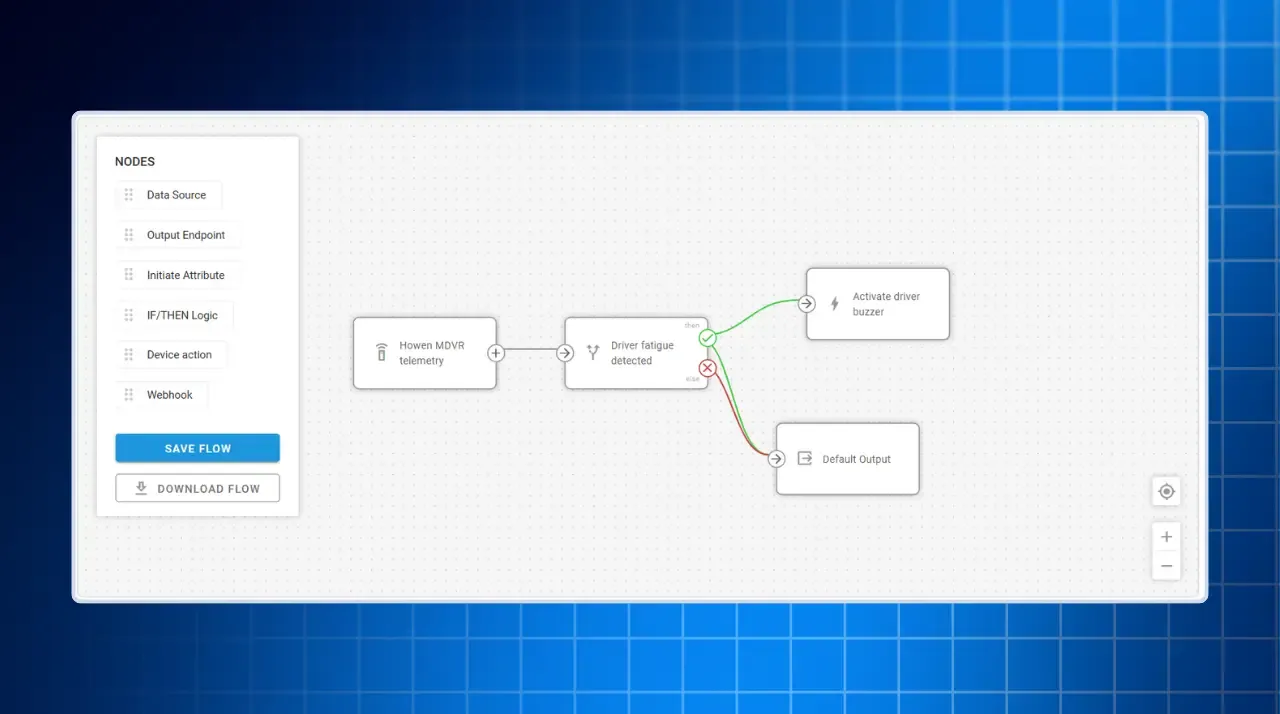
Le dispositif associe un système de caméra Howen MDVR avec un traceur GPS Teltonika FMB920. La caméra Howen effectue la surveillance de l’état du conducteur (DSM), détectant des comportements comme la fatigue, la distraction, l’utilisation du téléphone et les yeux fermés. Lorsqu’elle détecte un événement de fatigue, elle génère une télémétrie avec des codes d’événement spécifiques qui identifient le type de comportement.
IoT Logic reçoit cette télémétrie et évalue les données DSM. Lorsque le code d’événement de fatigue apparaît, une règle configurée déclenche le nœud Action. Le nœud Action envoie une commande de sortie numérique au traceur Teltonika FMB920 installé dans le même véhicule.
Le FMB920 dispose d’une sortie numérique pouvant contrôler des accessoires externes. Dans ce déploiement, un buzzer est relié à cette sortie. Lorsque le traceur reçoit la commande depuis IoT Logic, il active la sortie, et le conducteur entend un avertissement sonore.
Le processus complet, de la détection de fatigue par la caméra à l’activation du buzzer, se déroule sans intervention du répartiteur. La plateforme gère la coordination. Les appareils gèrent la réponse concrète. Et le conducteur bénéficie d’une alerte immédiate qui peut prévenir un incident plus grave.
Des applications plus larges dans divers secteurs et domaines
L’exemple de la fatigue déclenchant un buzzer illustre un usage en matière de sécurité, mais le mécanisme sous-jacent s’applique à toutes les situations où la coordination entre appareils apporte une valeur ajoutée.
- Les équipes de sécurité de flotte peuvent étendre ce principe au-delà de la fatigue. Les événements de distraction détectés par les caméras peuvent déclencher des avertissements similaires. Les événements de conduite brusque enregistrés par les traceurs peuvent activer des témoins lumineux au tableau de bord. Les excès de vitesse dans des zones géociblées peuvent générer des alertes audio immédiates plutôt que des rapports après coup.
- Les opérateurs logistiques qui gèrent les conditions de cargaison trouvent des possibilités similaires. Un capteur de température qui détecte une anomalie peut déclencher une commande vers un contrôleur de réfrigération connecté. Un capteur de porte qui enregistre un accès non autorisé peut activer le buzzer d’un traceur ou déclencher une capture d’image sur une caméra.
- Les opérations en chaîne du froid, où une variation de température peut détruire tout un chargement, bénéficient de réactions en quelques secondes plutôt qu’en minutes. Les scénarios de surveillance d’équipement, où une machine passe dans un état critique nécessitant une intervention immédiate, suivent la même logique.
- Les managers d’opérations sur le terrain supervisant des actifs distribués peuvent configurer des réactions automatiques basées sur des seuils de capteurs, réduisant la charge de surveillance tout en conservant une visibilité opérationnelle.
Le point commun à toutes ces applications est le remplacement de l’intervention manuelle par une automatisation configurée. La plateforme gère la logique. Les appareils exécutent les réponses. Les opérateurs se concentrent sur les exceptions qui nécessitent réellement une expertise humaine.
Conclusion : la valeur opérationnelle de l’automatisation d’appareil à appareil
Les plateformes de télématique se distinguent depuis longtemps par la collecte : recueillir des données issues des appareils, les stocker de manière fiable et les présenter via des tableaux de bord et des rapports. Les commandes machine-à-machine représentent un changement vers des plateformes qui agissent également, en déclenchant des réponses coordonnées sans devoir faire transiter les événements par des systèmes externes ou attendre l’attention humaine.
Cette fonctionnalité est désormais disponible dans IoT Logic. Une configuration est requise, ce n’est pas magique. Mais une fois mise en place, l’automatisation offre ce que les chaînes d’intégration ne peuvent pas apporter : des réactions immédiates qui restent au sein de la plateforme.
Pour les fournisseurs de services télématiques comme pour les exploitants de flotte, cela signifie des architectures plus simples, des réactions plus rapides et des modèles d’exploitation où les événements urgents sont traités en priorité, automatiquement.
Si vous voyez un potentiel pour les commandes machine-à-machine dans vos opérations, ou si vous souhaitez comprendre comment cette fonctionnalité peut s’appliquer aux appareils que vous utilisez, réservez une démonstration pour discuter de vos besoins. Pour en savoir plus sur la configuration de IoT Logic et la prise en charge des commandes aux appareils, consultez la documentation Navixy.
Sur cette page