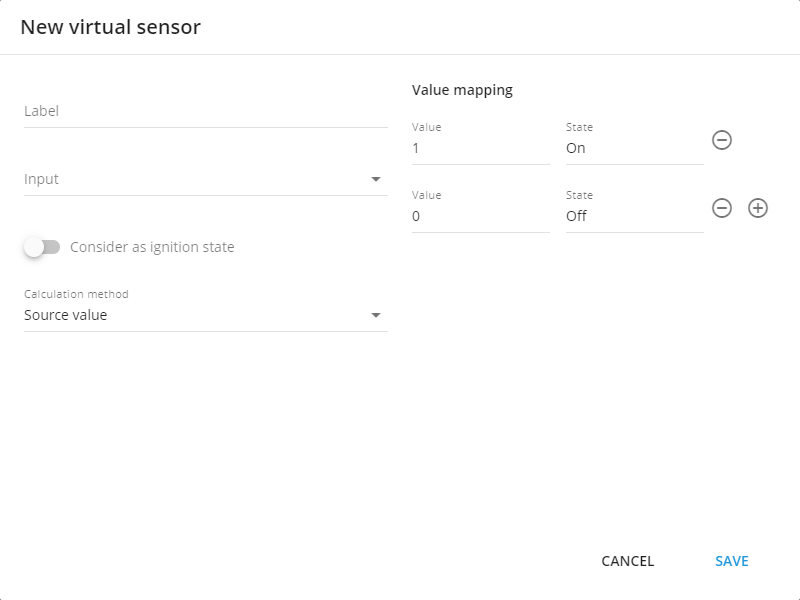
Interface du capteur virtuel
Interface du capteur virtuel
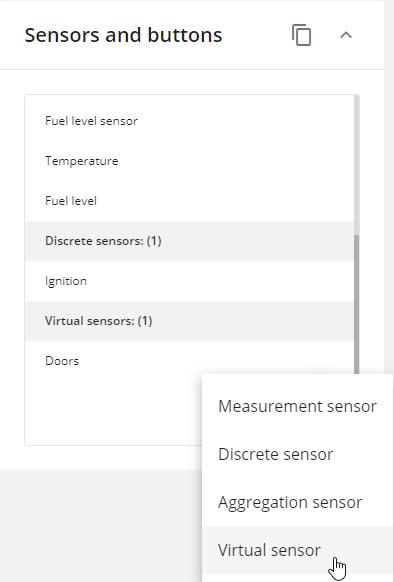
Ajout d’un capteur virtuel dans Boutons et capteurs
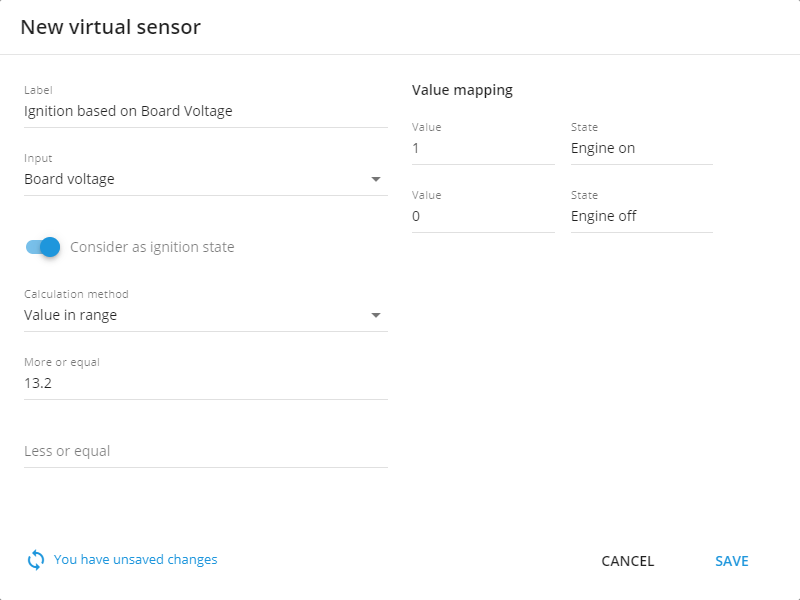
Exemple de configuration du contact virtuel
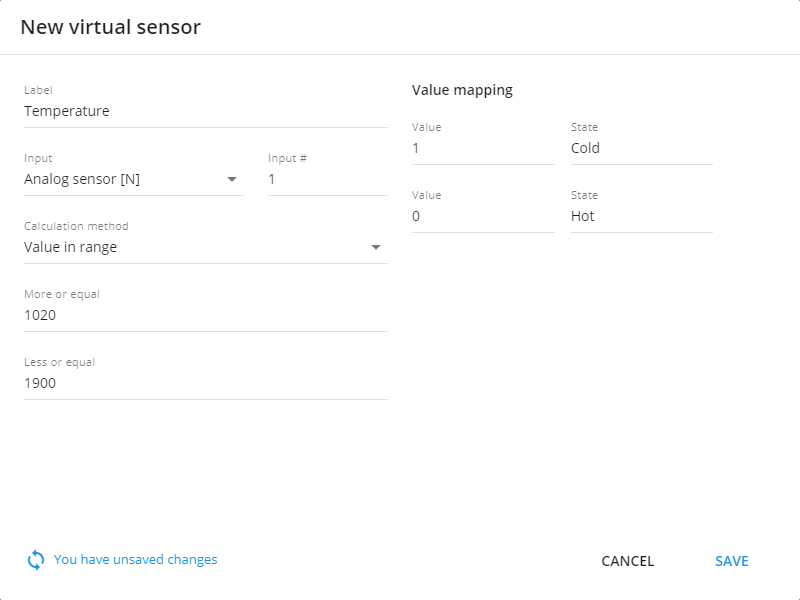
Exemple de configuration pour la lecture de la température à partir d’un capteur analogique
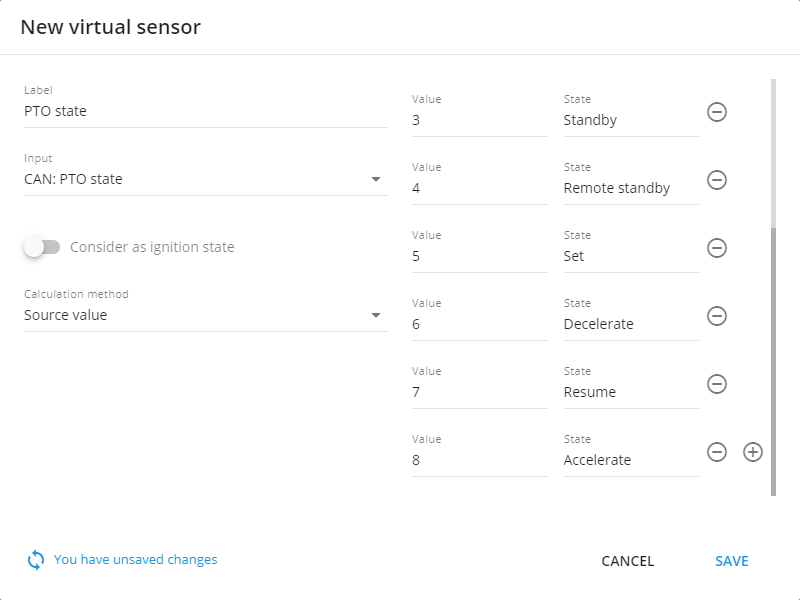
Exemple de configuration pour la méthode de calcul de la valeur source
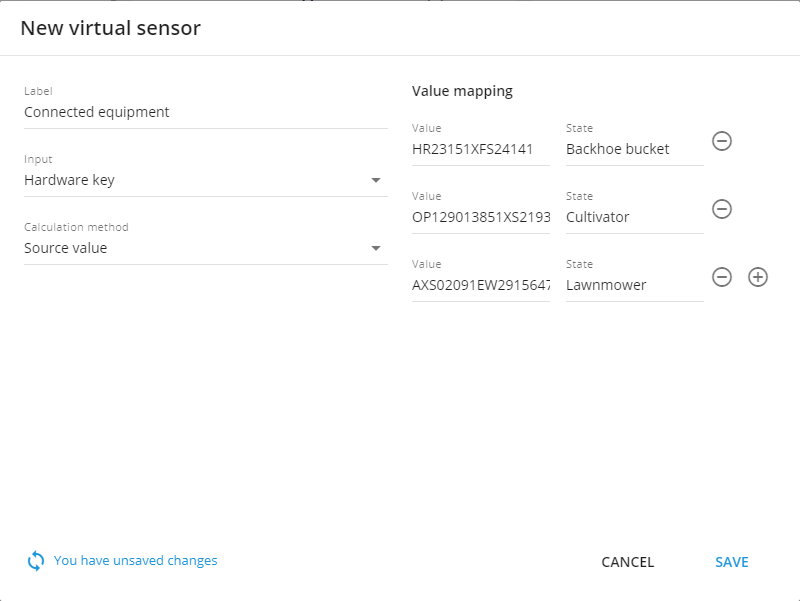
Exemple de configuration pour la méthode de calcul de la valeur source pour la lecture d’une clé matérielle ou d’un champ d’état
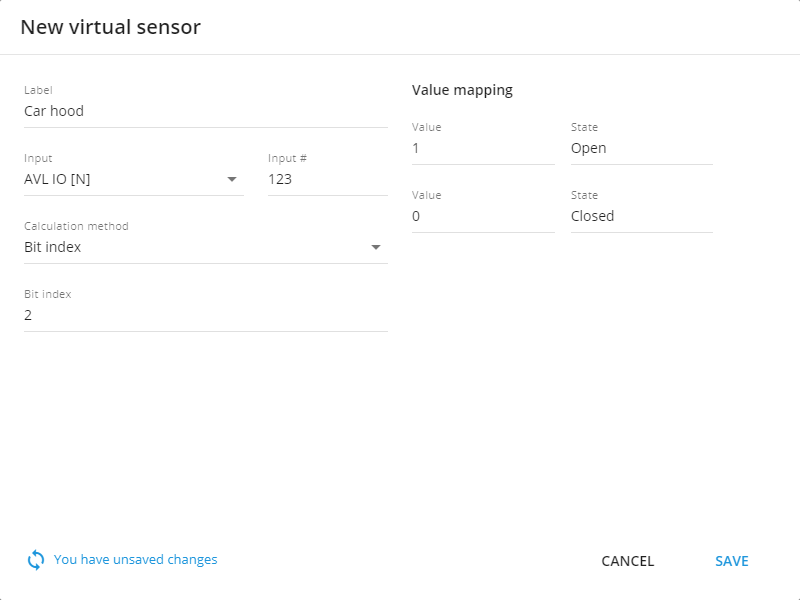
Exemple de configuration pour le capteur utilisant la méthode de calcul Indice de bit