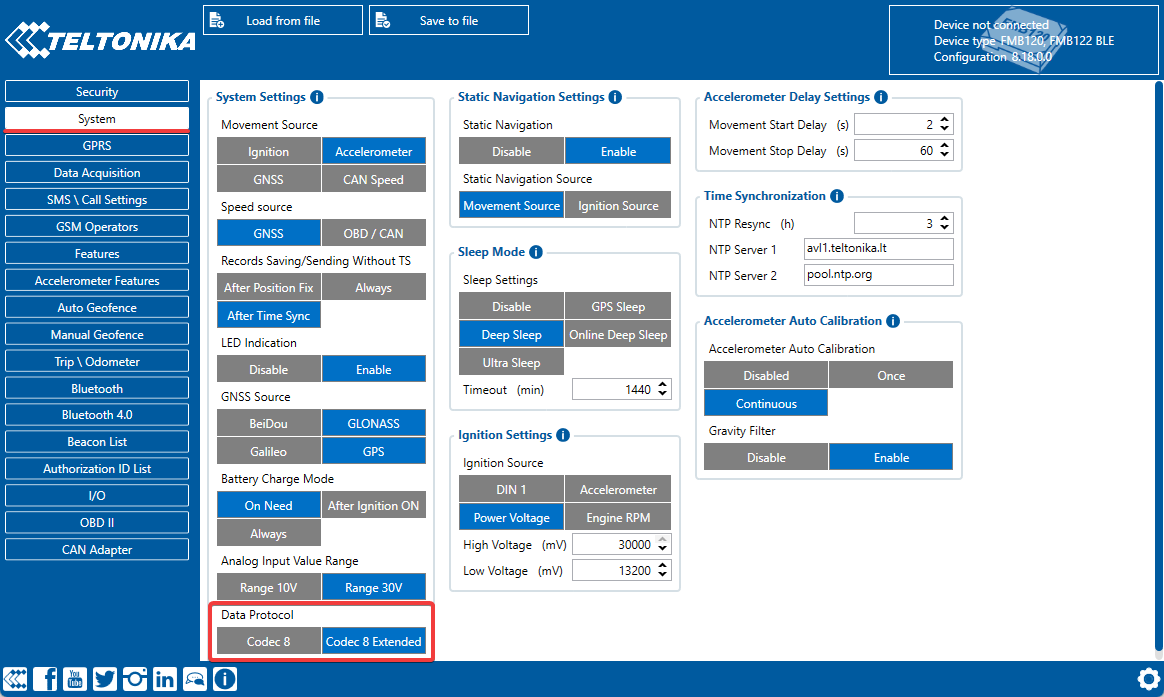
Habilitación de Codec 8 Extended en Teltonika Configurator
Habilitación de Codec 8 Extended en Teltonika Configurator
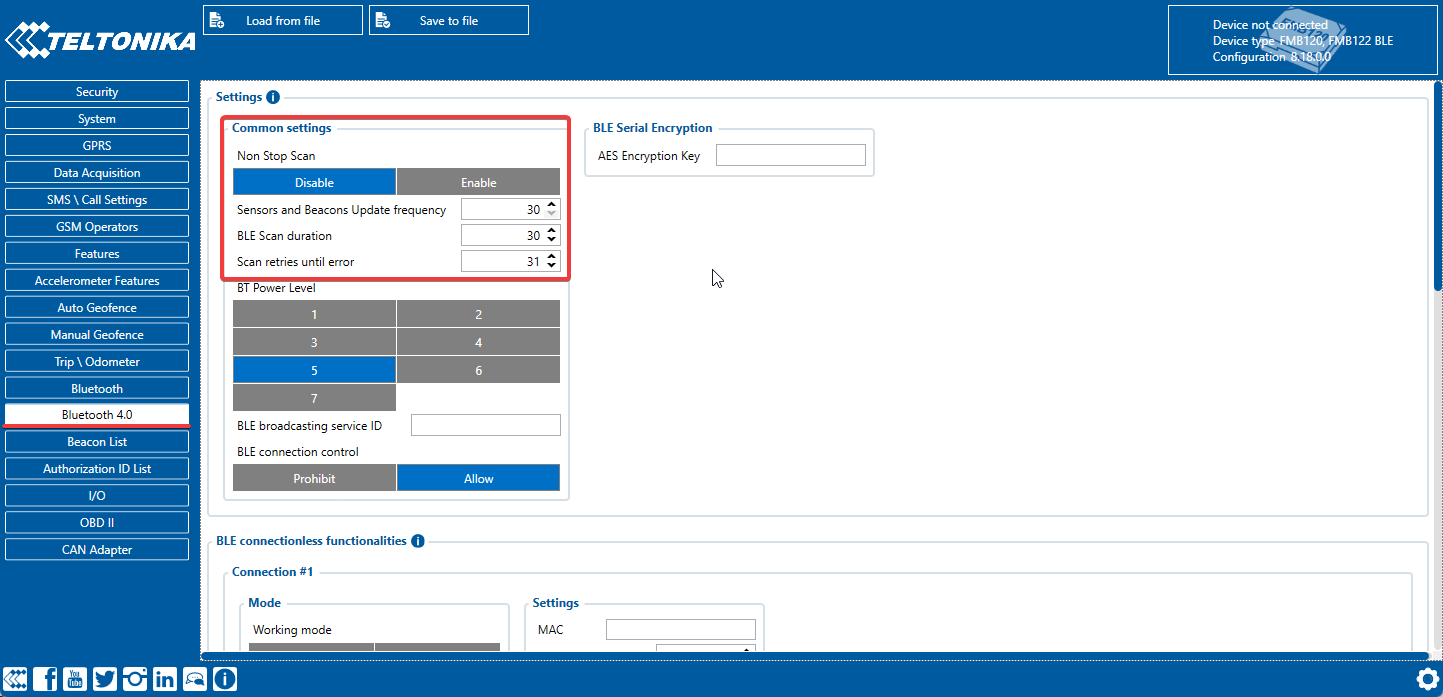
Frecuencia de escaneo para sensores BLE
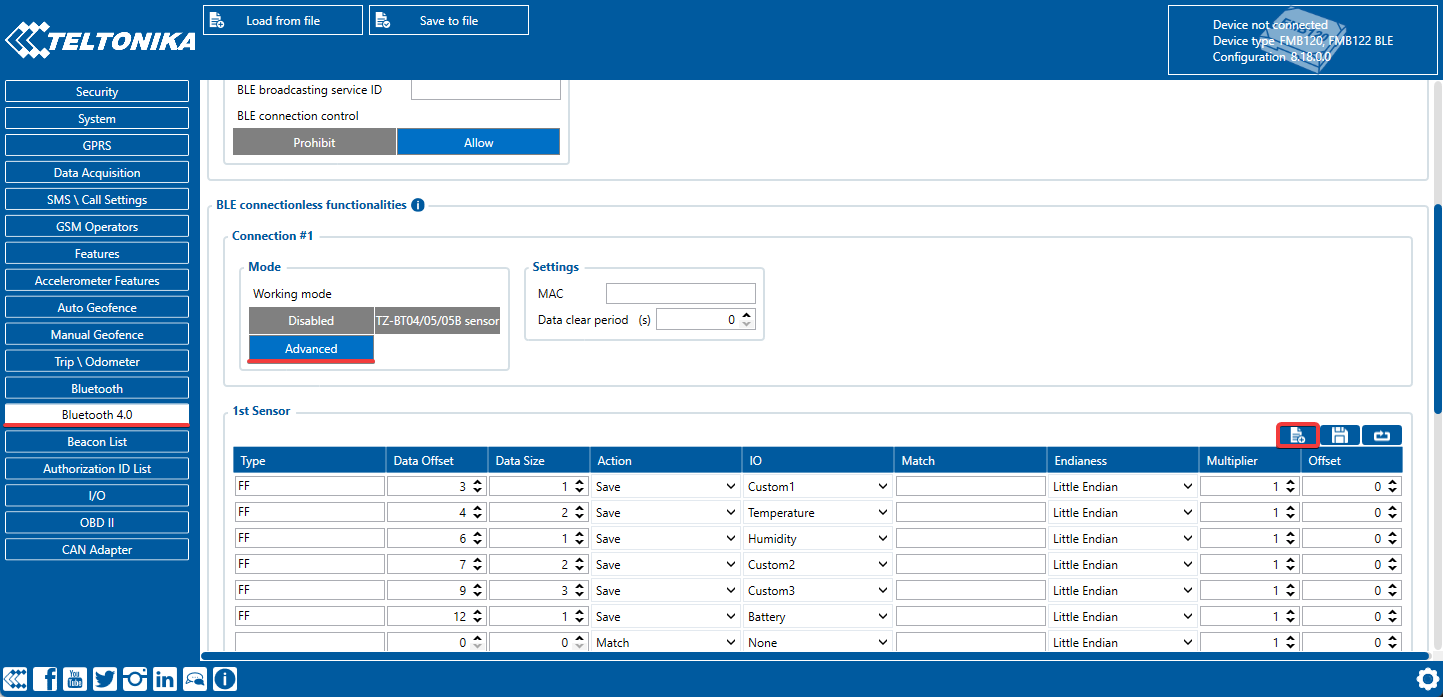
Configuración del modo avanzado para el sensor y la ubicación del botón de la Lista predefinida
Configuración del envío de datos del sensor en los paquetes del dispositivo
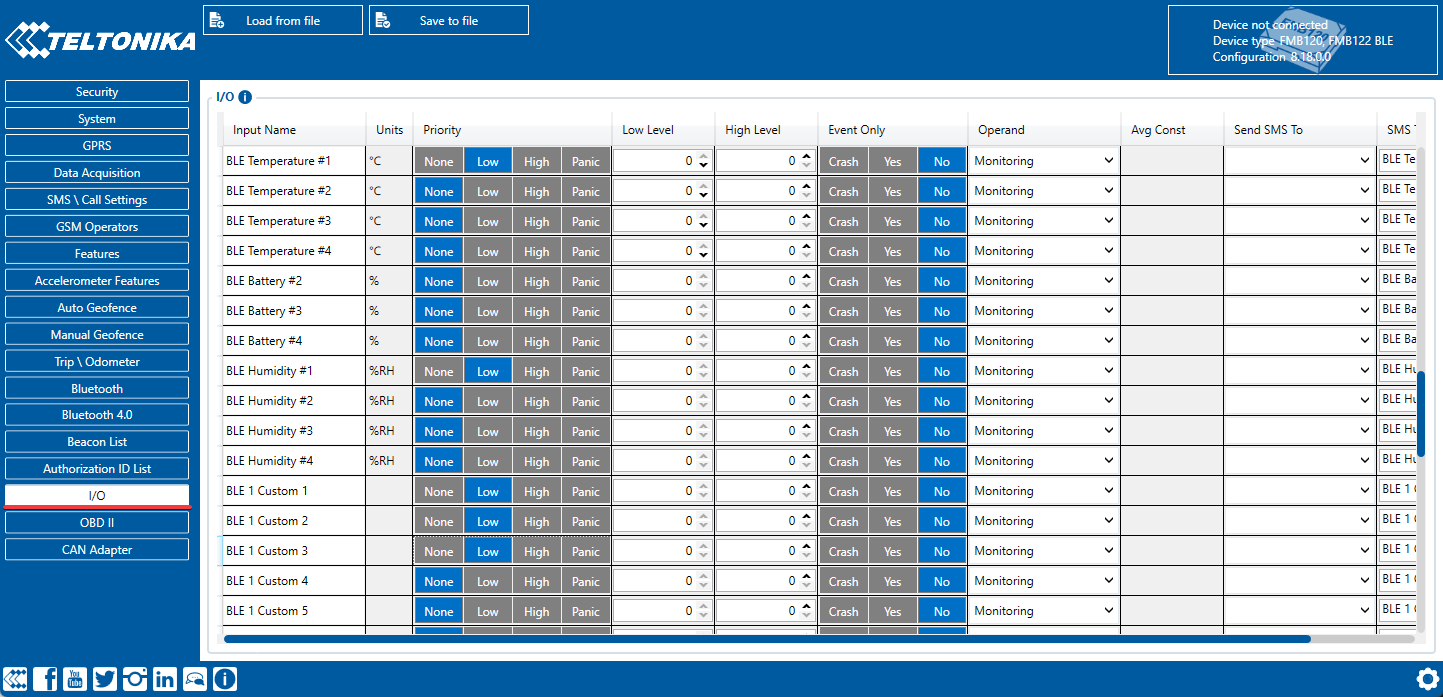
Configuración del Sensor Virtual para leer el estado de movimiento del sensor Eye
Configuración del sensor BLE de humedad
Configuración del sensor BLE de temperatura
Ejemplo de configuración del sensor de estado del imán con sus valores y nombre