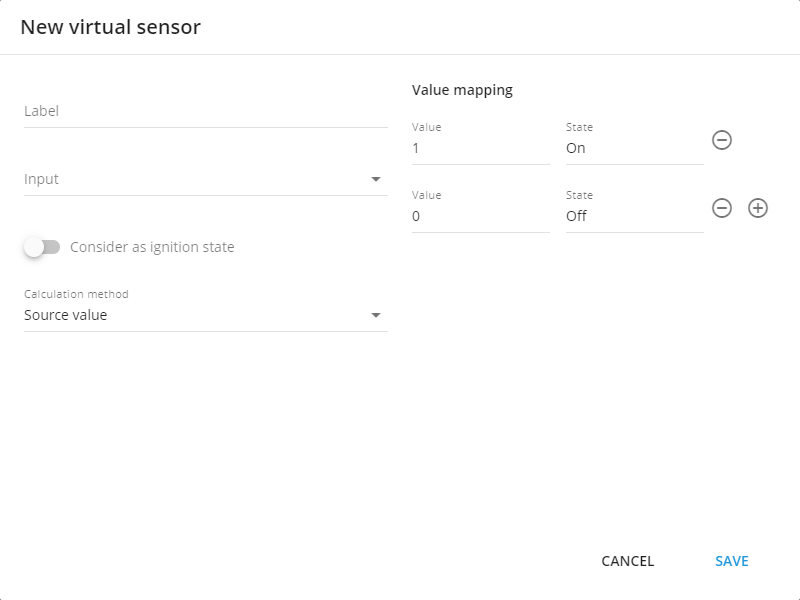
Interfaz del sensor virtual
Interfaz del sensor virtual
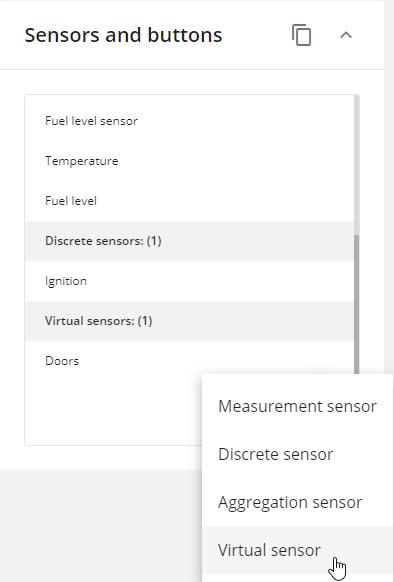
Agregar un sensor virtual en Sensores y botones
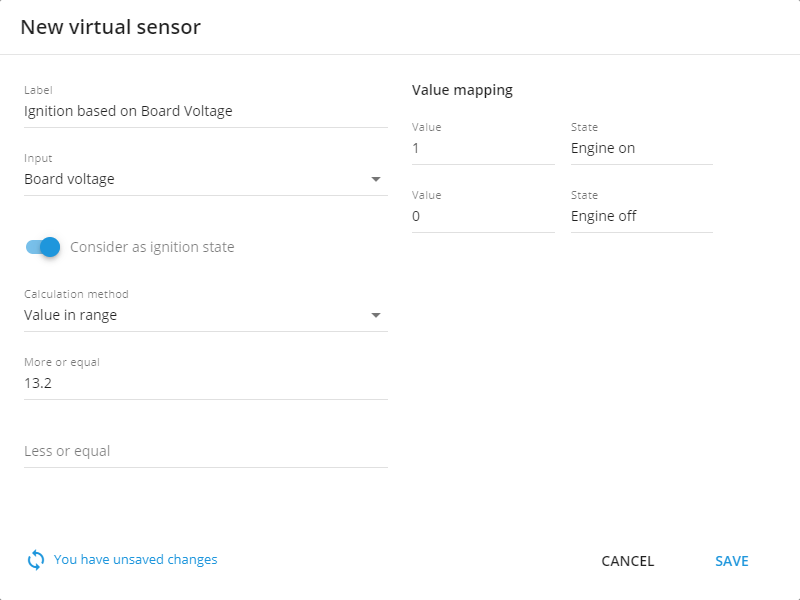
Ejemplo de configuración de la ignición virtual
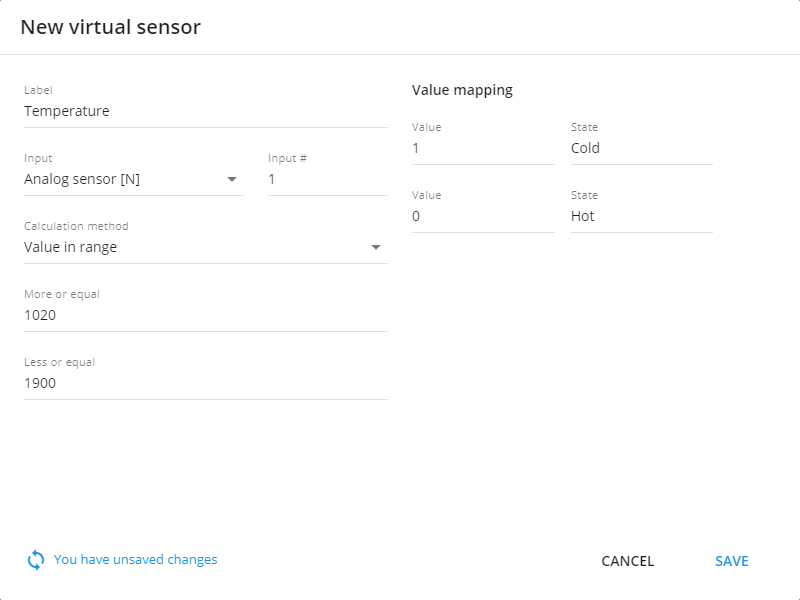
Ejemplo de configuración para lectura de temperatura desde un sensor analógico
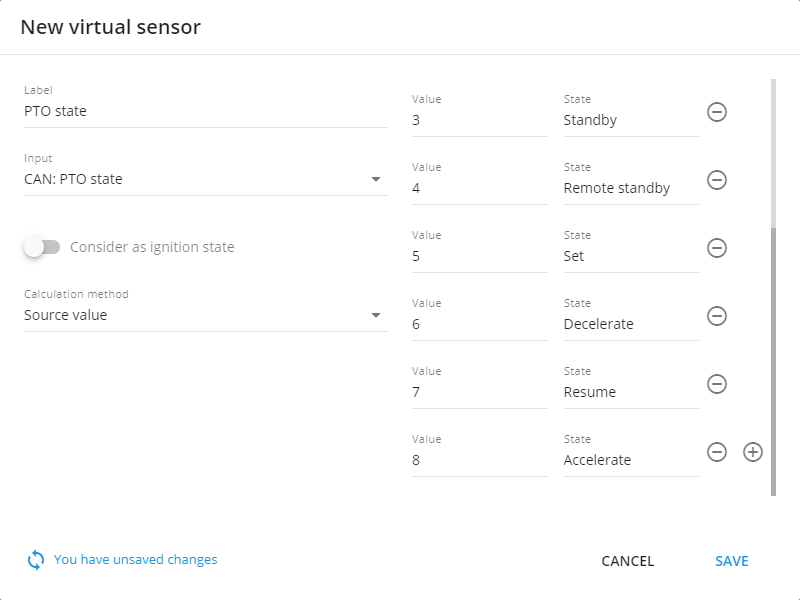
Ejemplo de configuración para el método de cálculo de valor de origen
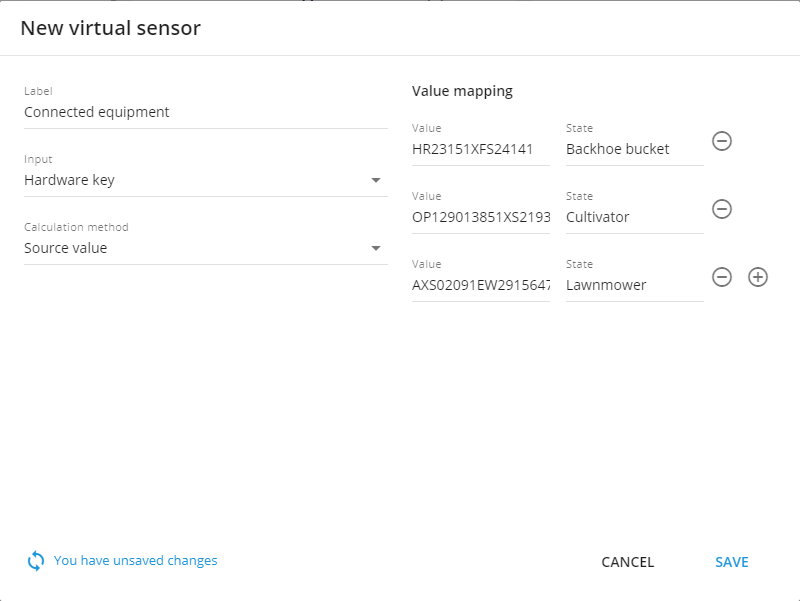
Ejemplo de configuración para el método de cálculo de valor de origen para la lectura de un sensor de llave de hardware o de campo de estado
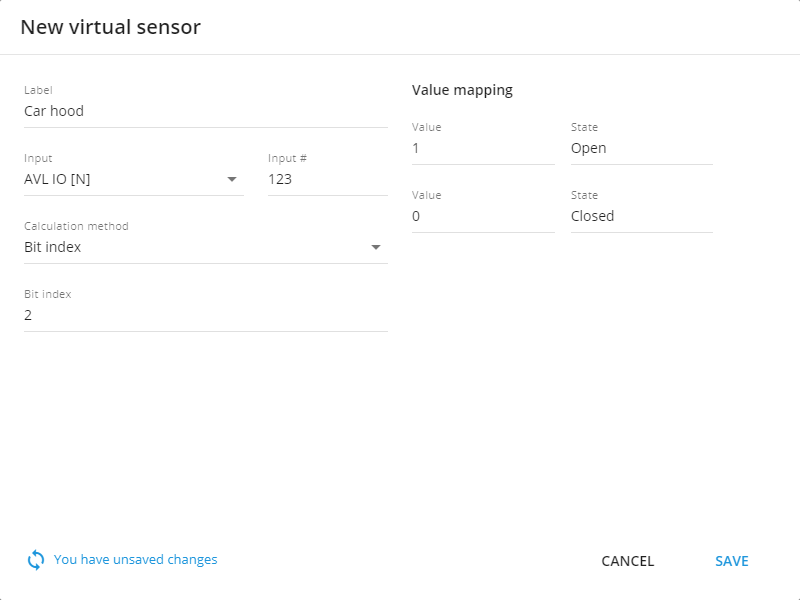
Ejemplo de configuración del sensor para el cálculo de índice de bit